Abstract:
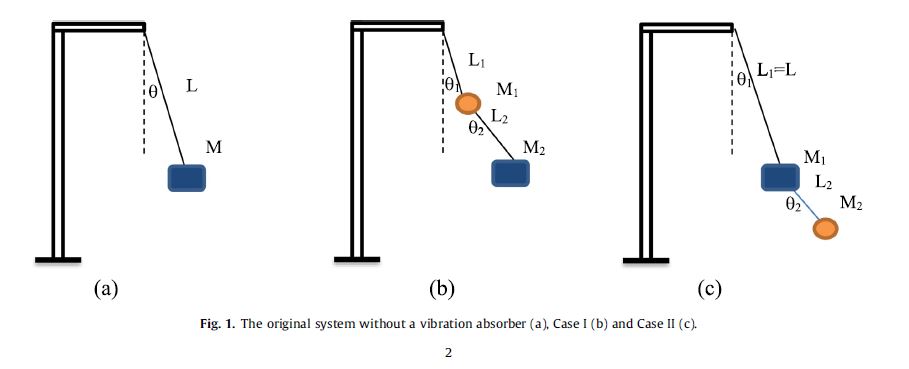
The paper proposes and investigates nonlinear vibrations mitigation strategies of an externally excited pendulum. This problem is highly relevant to the crane’s payload behavior, which dynamics is typically described by a nonlinear pendulum model. Currently, there are various active control strategies to mitigate swinging vibrations of the payload that require some knowledge on the payload state, but, to the authors’ best knowledge, there are no passive measures to mitigate such vibrations. The proposed strategies involve the utilization of another pendulum, which adjustable mass and length can tune the pendulum nonlinear characteristics to reduce the vibrations of the payload. The obtained results for the nonlinear system have identified the optimal configuration of the absorber and the appropriate set of parameters, which allow reducing the payload’s amplitude of vibrations more than five times.
.
Authors:
Daniil Yurchenko , Panagiotis Alevras , Shengxi Zhou , Junlei Wang, Grzegorz Litak , Oleg Gaidai , Renchuan Ye
This paper was published in: Mechanical Systems and Signal Processing 156 (2021) 107558
To read full text, please visit publisher site or download pdf file.